基于PIC16F72單片機的遙控照明燈(圖)
|
上傳人:admin 上傳時間: 2009-04-29 瀏覽次數: 513 |
一、概述
在表演舞臺上,為了營造某種特殊效果,需要關閉除探照燈以外的所有現場燈。探照燈必須照在演員身上。由于探照燈通常高高懸掛在天花板上,當演員移動時,依靠人工完成探照燈方向調節是非常不方便的,而通過遙控調節則很方便,有時演員的位置又是固定的,這可能需要多臺探照燈透視照射一個固定位置(例如舞臺的中央 ) 。如果探照燈能夠將這些位置以及燈的亮度值進行預存,需要時再直接調用則會方便很多。
針對上述應用,此處介紹一種支持數據存儲的遙控探照燈系統來實現上述功能。該系統還可應用在監獄、各種高空作業和曠野、海面等工作場所.對遠距離巡查、追蹤、搜索、拯救和施工作業進行全方位、多角度照明。在實際應用中,由于照射點的位置隨時變更,則要求探照燈可以上下左右360自由移動。所以本裝置采用了兩個電機,一個控制探照燈上下轉動。另一個控制探照燈左右轉動。
此外,為了達到操作快捷方便,通常.較為大型的舞臺又不僅只裝備一臺探照燈,而且有時兩臺以上的探照燈安裝距離還可能離得很近。當控制某一臺探照燈時,不能影響鄰近的探照燈,這就要求遙控控制信號的方式要完全分開。因此,本制作采用無線遙控方法,分別以不同編碼方式,選擇在發送探照燈預選信號和發送探照燈轉動控制、亮度控制時等命令的無線模塊編碼不一樣,在場景存儲及調出模式的最后確認(控制哪臺探照燈或進行哪種模式控制 ) 時采用設置的無線控制模塊,從而實現準確、方便的調節。
另外,燈的亮度控制應盡可能采用微調來滿足各種亮度的需求,因此,將燈的亮度從最亮到熄滅劃分為 256 個段,也由單片機的PWM輸出實現。
二、系統硬件
1 .總體結構
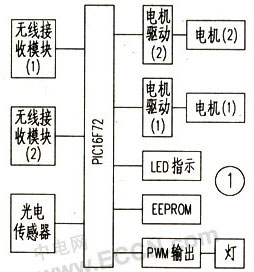
該系統共包括 5 個模塊:CPU模塊、電源模塊、電機模塊、燈控模塊和通信模塊。其中,通信模塊包括兩個不同編碼方式的天線遙控模塊和指示燈顯示模塊.總體硬件原理框圖見圖1所示。
無線接收模組接收信號后送入CPU進行分析,以確定命令的性質。由光電耦合器、電機驅動及電機組成的閉環電路用來控制電機的位置,以控制探照燈的照射點,在電源模塊中產生一個2倍工頻的信號,該信號連接到 CPU 的中斷腳,中斷程序通過 pwm 輸出電路控制燈的亮度,EEPROM用來存儲數據預設、探照燈位置和亮度,指示燈用來顯示探照燈當前的狀態。
2 . CPU 模塊
該系統的各個子功能模塊須盡量減 少硬件,并盡可能用軟件代替硬件,從而降低成本,電機的驅動沒有采用專用的驅動芯片,而是由于通用 I/O 接口通過三極管來驅動電機轉動。由于節省了許多專用模塊.因此必然會增加對 CPU 通用 I / O 的需要。這就要求CPU中要有足夠的通用 I / O 接口,此外,系統還必須能穩定可靠地工作,并具有較強的抗干擾能力。因此選用了PIC16F72單片機。電路見圖 2 所示。
3 .通信模塊
無線接收模組直接采用現成的帶 2272 解碼的模塊,由于其電路模塊采用成熟模塊,加之電路形式比較常見,故此不再詳細介紹。
4 .燈控模塊
硬件原理見圖 3 所示, T1 為濾波電感, Q1 為可控硅, Ul 為光電隔離器, CPU 信號通過 Q2 控制 U1的通斷,當U1 導通時, Q1 導通,當 U1 關斷時,反相電壓使 Q1截止,通過控制可控硅的導通時間可實現控制燈的亮度控制。
5 .電機模塊
該系統有兩個相同的直流電機模塊。由通用 I / O 接口通過三極管控制轉停 ( 如圖 4) 。當 Q3 、Q6導通時,電機正轉;當 Q4 、 Q5 導通時,電機反轉;當 Q3 的通斷由 Q1 通過 R1 、 R2 分壓實現控制,當Q1導通時, R1 兩端的壓降使 Q3 導通。
6 .電源模塊
該系統由 220V 工頻交流電供電,電源模塊的功能是輸出兩個電源 (5V 的單片機電源和 12V 的直流電機電源)和一個中斷源。中斷源用來產生兩倍工頻的中斷信號給單片機,從而調節探照燈的亮度,因此,該系統采用了一個 220V 轉雙12V變壓器,并通過二極管、三端穩壓器和校正電容實現輸出。

用戶名: 密碼: